

摘要:,,本文研究了智能车辆的设计与实现,重点探讨了基于深度学习的自动驾驶系统。通过深度学习的算法,智能车辆能够识别环境信息,自主决策并控制行驶。该设计旨在提高车辆的安全性和行驶效率。研究内容包括自动驾驶系统的构建、深度学习算法的优化及其在智能车辆中的应用。这种技术有望推动汽车行业的革新,实现更智能、更安全的驾驶体验。
本文目录导读:
随着科技的快速发展,自动驾驶技术已成为汽车工业和信息技术领域的研究热点,本文旨在探讨基于深度学习的智能车辆的设计与实现,通过综合运用计算机视觉、自动控制理论、人工智能等技术,实现车辆的自动驾驶功能,本文首先介绍了自动驾驶的背景和意义,然后详细阐述了系统的总体设计、关键技术实现、实验验证及结果分析,总结了研究成果,展望了未来的研究方向。
自动驾驶技术是一种通过计算机系统和传感器实现车辆自主导航和行驶的技术,随着人工智能技术的不断发展,自动驾驶技术已成为汽车工业的重要发展方向,智能车辆的设计涉及到多个领域的知识,包括计算机视觉、自动控制理论、人工智能等,本文旨在设计并实现一种基于深度学习的自动驾驶系统,以提高车辆的智能化水平,提高行驶的安全性和舒适性。
系统总体设计
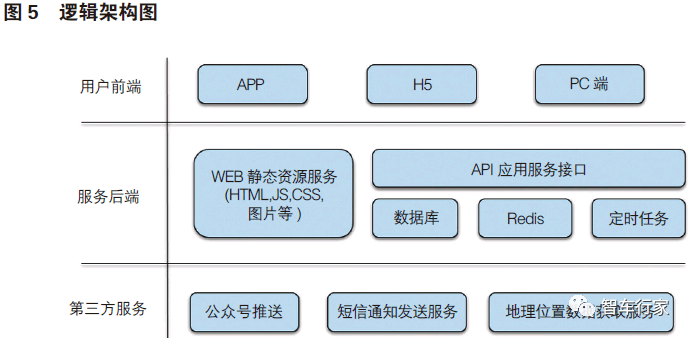
智能车辆的设计主要包括硬件和软件两部分,硬件部分主要包括车辆传感器、计算平台和控制执行器等;软件部分主要包括感知环境、规划决策和控制执行等模块,基于深度学习的自动驾驶系统总体设计如下:
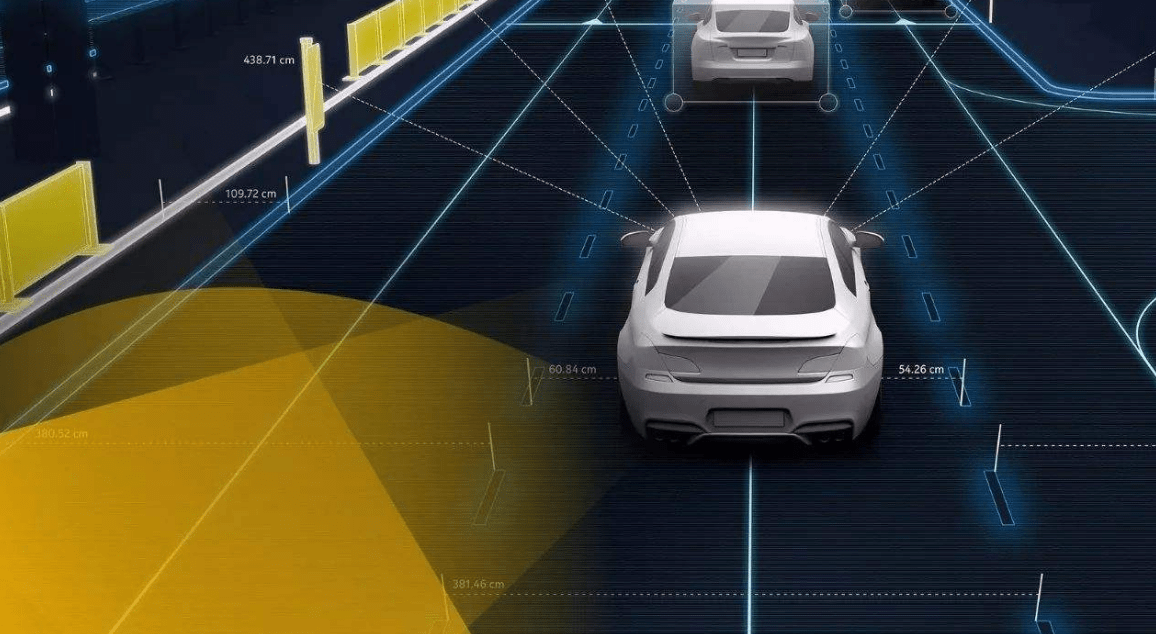
1、传感器模块:采用激光雷达、摄像头、超声波等传感器,实现车辆周围环境的感知。
2、计算平台:采用高性能计算机和深度学习算法,实现环境感知、路径规划和决策控制等功能。

3、控制执行模块:通过控制车辆的动力系统和制动系统,实现车辆的自主驾驶。
关键技术实现
1、环境感知:通过摄像头和激光雷达等传感器,获取车辆周围环境的信息,包括道路、车辆、行人等,采用深度学习算法,对获取的数据进行训练和学习,实现环境感知。
2、路径规划:根据车辆当前的位置和目标地点,规划出最优路径,采用深度学习算法,根据环境感知的结果和车辆状态信息,实时调整路径规划。
3、决策控制:根据路径规划和环境感知的结果,进行决策控制,采用深度学习算法,对车辆的行驶状态进行实时监控和预测,实现车辆的自主驾驶。
实验验证及结果分析
为了验证基于深度学习的自动驾驶系统的性能,本文进行了实验验证,实验包括室内仿真实验和实地测试两部分。
1、室内仿真实验:在室内环境下,模拟车辆行驶的各种场景,包括城市道路、高速公路、交叉口等,通过仿真实验,验证系统的环境感知、路径规划和决策控制等功能。
2、实地测试:在真实的道路环境下,进行实地测试,测试结果表明,系统能够准确地感知周围环境,实现自主驾驶功能,系统具有良好的稳定性和安全性。
本文设计并实现了一种基于深度学习的自动驾驶系统,通过综合运用计算机视觉、自动控制理论、人工智能等技术,实现了车辆的自动驾驶功能,实验验证表明,系统具有良好的性能。
自动驾驶技术仍然面临一些挑战,如复杂环境下的感知问题、路径规划优化问题等,未来研究方向包括:进一步提高系统的智能化水平;加强系统的安全性和稳定性;探索新的算法和技术,提高系统的性能。
参考文献
[请在此处插入参考文献]
致谢
感谢指导老师对本研究的悉心指导和帮助,感谢实验室同学们的支持和协助,感谢学校和学院提供的良好学习和研究环境,感谢家人对本研究的理解和支持。
本文旨在设计并实现一种基于深度学习的自动驾驶系统,通过综合运用计算机视觉、自动控制理论、人工智能等技术,实现车辆的自动驾驶功能,本研究不仅提高了车辆的智能化水平,而且为未来的智能交通系统的发展奠定了基础。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...